

扩展卡尔曼滤波:用算法给数据降噪,预测更准
什么是卡尔曼滤波?
简单来说,就一句话,就是通过软件算法,来提高参数的可信度!这种算法就是卡尔曼滤波!
“ Essentially, a Kalman Filter is an algorithm that takes all information known about a system to make abest guessabout that system’s future state.”
“本质上来说,卡尔曼滤波是一种算法,它获取系统所有的已知信息,同时对系统的未来状态做出最佳的预测”
为什么叫Filter?
卡尔曼是从噪声信号中寻找最优的估计量,这个过程相当于对噪声信号进行“过滤”。
优化问题
优化目标是预测参数的均方误差最小
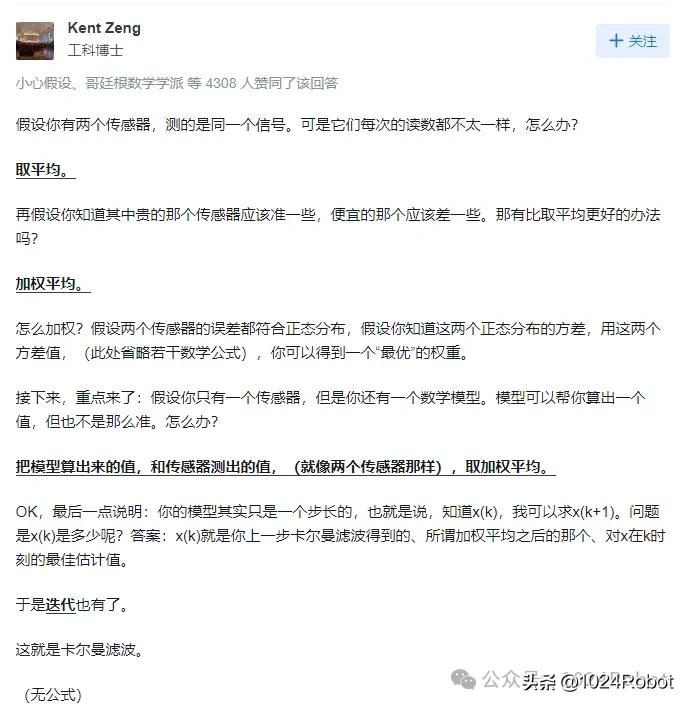
加权平均
对传感器测量值和系统状态估计值,进行加权平均,权重因子(卡尔曼增益)动态调整
滤波器输入输出
输入:测量值 输出:状态估计值
噪声
过程噪声源自于系统动态模型,测量噪声源自于传感器测量。
基本要素:
传感器、系统动态模型、加权系数、迭代计算等。
三大功能
测量(Measurement),通过传感器获取系统数据,但需要考虑传感器的噪声,因此需要考虑测量噪声;
预测(Predict),基于系统动态模型,即基于系统当前状态信息,来预测下一状态的信息。即已知(n-1)时刻的状态信息,基于(n-1)状态信息,来预测n时刻的状态信息。但是模型不一定准确,存在所谓的系统噪声;
更新(Update),当前时刻(n)状态值,为预测值和测量值的加权求和,同时也需要对该时刻(n)的加权因子(卡尔曼增益)进行计算。但需要注意的是,我们同时也要更新权重系数,权重系数是动态调整。
基本流程
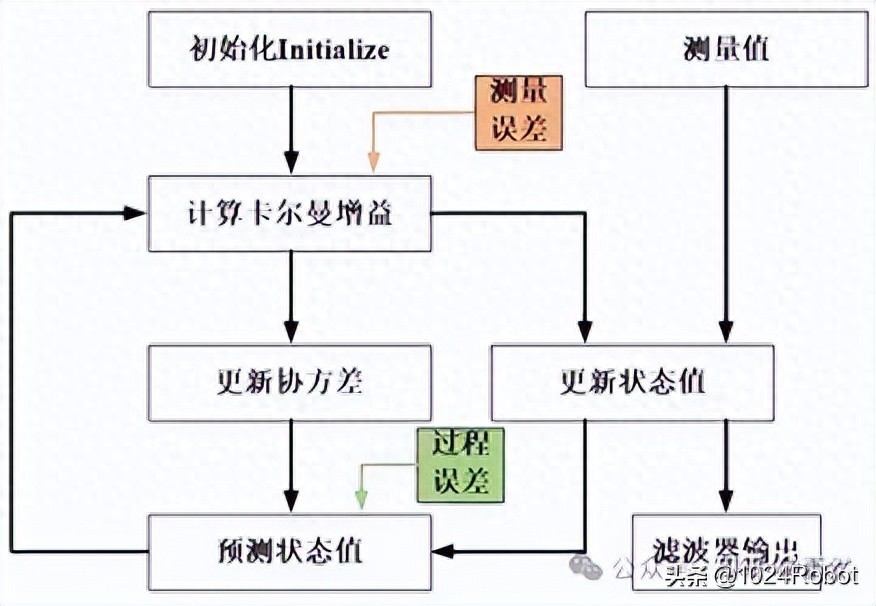
五大公式(细节处略有差异)
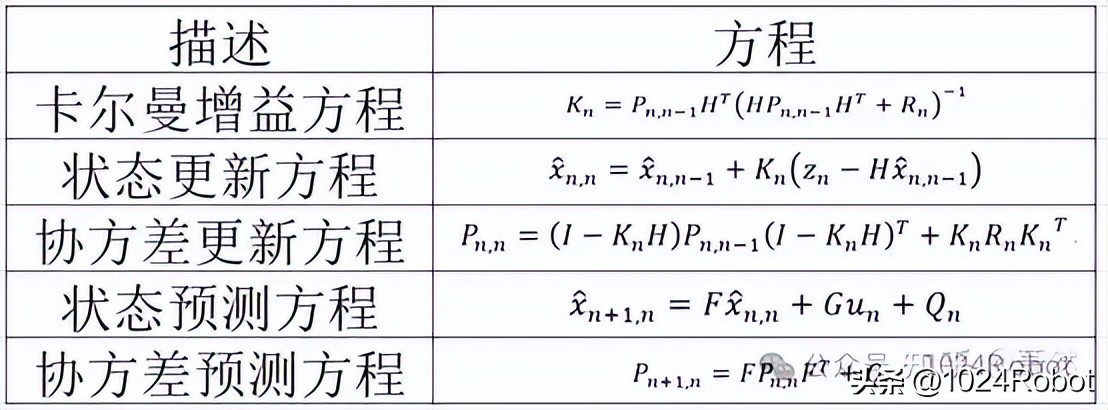
卡尔曼滤波算法,通过不断结合测量值和预测值来提高对系统状态的准确度,通过结合系统模型和观测数据,不断修正对系统状态的估计,以提高状态估计的准确性。
另外知乎有大佬,解释地十分通俗易懂,十分透彻!
图片源于网络
图片源于网络